





苏州中德睿博智能科技有限公司(Sino-German Robooster Intelligent Technology Co. Ltd)
由机器人与导航定位专业的留德博士于2015年创立,秉承“严谨、耐心、专业、精益求精”的工匠精神,以“让人工智能‘慧’眼识途”为愿景,立志做全球的全场景定位解决方案供应商。团队深耕移动机器人及自主移动解决方案多年,专注于多传感器信息融合、全源融合定位、即时成图与定位(SLAM)、移动载体运动测量等领域,集行业认知、核心技术、批量生产、供应链优势于一身。
公司的主要产品包含:
时间同步器(RS-TS5)
RS-TS5可基于外部1PPS 或者内部时钟,实现8通道的同步触发信号生成。8个通道之间、8个通道与外部 1PPS之间的同步精度达到µs级,当外部 1PPS 无效时,可自动切换为外部基准。8个通道参数可通过串口单独配置,配置参数包括输出频率、输出占空比和输出有效电平。
特点:
组合导航及外同步模块与组合导航基站(RS-INTS1、RS-INTB1)

RS-INTS1组合导航及外同步模块内部集成双天线差分GNSS模块、3轴陀螺、3轴加速度计、3轴磁强计以及气压计,内部传感器采样时严格与1PPS 同步,同时将GNSS 的1PPS 作为输入,可以根据用户配置的频率,生成并输出与1PPS同步的最多6路同步信号,用来给用户的其他设备提供触发信号,6 路同步信号的频率、占空比等均单独可配置。组合导航及外同步模块内部集成4G模块,与RS-INTB1组合导航基站模块配对使用,上电自动与组合导航基站模块通信,实现上电即可高精度 RTK 定位。双天线差分 GNSS 模块同时可为用户提供高精度的方位输出。RS-INTS1亦支持千寻数据的RTK,无需复杂操作,客户端输入千寻账号后,即可一键RTK。
特点:
多源融合同步采集设备(RS-SLAMBase/RS-SLAMBasePro)
SLAM Base多源融合同步采集设备采用高性能ARM多核处理器,内部集成双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压计,内部传感器采样与1PPS同步,同时将GNSS的1PPS作为输入,可以根据用户配置的频率,生成并输出与1PPS同步的最多4路同步信号,用来给用户的其他传感器提供触发信号,是SLAM及三维维重构研究的理想同步采集平台。
特点:
多源融合定位与建图装置(RS-SLAMPlus/RS-SLAMPlusPro)

SLAM Plus全源融合定位建图设备是一款高度集成的高性能感知设备,融合了先进的传感器技术和时间同步机制。该设备内部集成四目环视相机、激光雷达、双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压计,内部传感器采样严格与1PPS(Pulse Per Second)同步,所有传感器数据采用ROS节点方式输出,所有数据接口均采用带锁扣连接器,更适合移动载体。SLAM Plus为多传感器融合、SLAM、测绘三维建模及全源融合导航研究者提供了一个强大即插即用的解决方案,是当今头部的感知测量和全源融合导航开发平台。
特点:

简介:

产品:
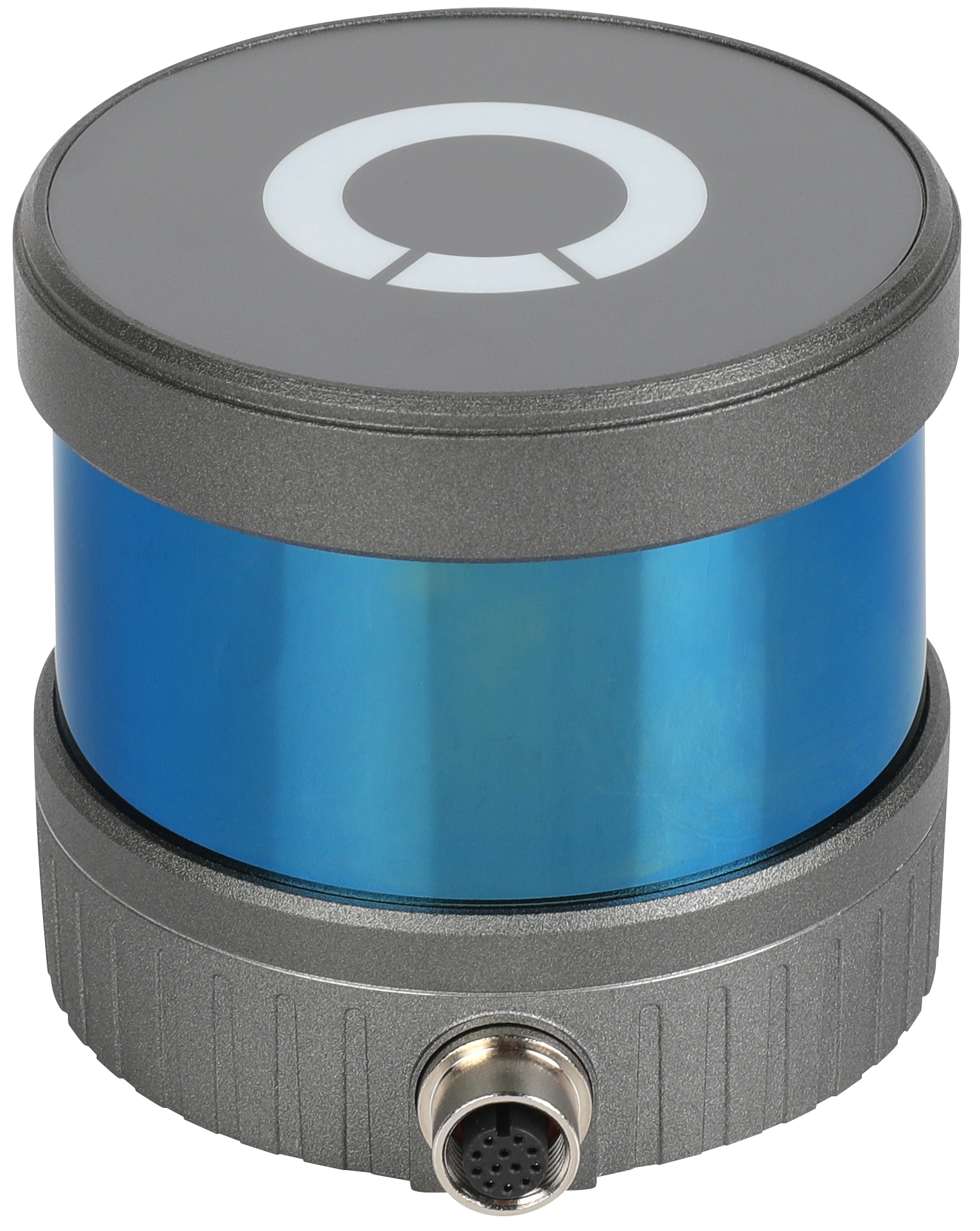
欧镭激光提供面向工业和商业移动机器人的导航定位和避障用1D,2D,3D激光雷达。
A090/A200 1D激光测距传感器

特点:
应用:
LR-1BS2 2D激光雷达传感器

特点:
应用:
|
LR-1BS5 2D激光雷达传感器

特点:
应用:
|
VF1-25系列 2D激光雷达传感器

特点:
应用:
|
LR-1F 2D激光雷达传感器

特点:
应用:
|
GS1-5功能安全型激光雷达传感器

特点:
应用:
|
LR-16F 3D激光雷达传感器
特点:
应用:
|

摩尔芯光(LightIC)于2019 年成立,总部位于北京。
公司拥有光子集成技术,致力于研发和生产基于硅光技术的激光雷达(LiDAR)芯片及系统,并专注于下一代 FMCW 技术路线的激光雷达的整机开发及量产。
FMCW雷达因具备强抗干扰性、低功耗及高精度测距测速优势,广泛应用于汽车、无人机导航、工业自动化和航空航天等领域。
摩尔芯光已成功推出FMCW动态瞬识激光雷达系统LARK

LARK核心优势:
主要技术参数:
| 参数 | 指标 |
| 激光级别: | Class 1 |
| 测距范围: | 1~300m (200m @10%) |
| 测距准度 1σ: | 3cm |
| 测速范围: | -240~240km/h |
| 测速精度: | 0.05 m/s |
| 盲区: | ~0.5m |
| 水平视场: | 120° |
| 水平分辨率: | 0.1° |
| 垂直视场: | 25° |
| 最小垂直分辨率: | 0.08° |
| 角度精度: | 0.05° |
| 帧率(fps): | ~10Hz |
| 回波模式: | 支持单回波 & 双回波 |
| 点频: | 1.5M/s(单回波),3M/s(双回波) |
| 传输方式: | 1000Mbps Ethernet over UDP connection |
| 时间同步: | PTP |
| 尺寸 W*D*H(mm): |
206mm x 140mm x 46mm |
| 重量: | 1.9 Kg |
| 数据内容: | 时间戳,点位置信息,速度,反射率 |
| 电压范围: | DC 9-32V |
| 功耗: | ~90W |
| 防护等级: | IP67 |
| 工作温度: | -20~65℃ |

芯探的Flash激光雷达具备测距能力长、抗干扰能力强、适合大规模量产等优势,可以将更高效的感知能力赋予车辆、机器人、物联网、安防等行业,让人类生活更舒适高效。
产品特点:
应用范围:
 |
 |
 |
| 体积测量 | 门禁/安防 | 机器人 |
 |
 |
 |
| 辅助驾驶 | 智慧道路 | 无人车 |
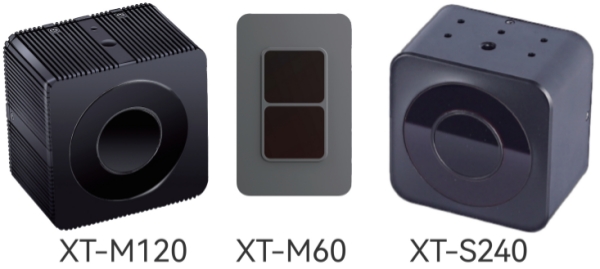
| 产品名称 | S系列-工业级 | |
| XT-S240 Mini | XT-S240 Pro | |
| 场景 | 低速 | |
| FOV 图像视角 | 106° × 80° | 72° × 58° |
| 光波长 | 940 nm | |
| 平均功率 | 6 W | |
| 输出数据 | 3D点云、深度图像、反射率图、灰度图 | |
| SDK | C++ / Python / Linux / Ros1 & Ros2 | |
| 准度 | 1% - 2% | |
| 角分辨率 | 0.33°(H) × 0.33°(V) | 0.22°(H) × 0.24°(V) |
| 分辨率 | 320 × 240 | |
| 测试距离 50% 反射率 |
10 m 室外 | 15 m 室外 |
| 帧率(FPS) | 10 - 20 | |
| 体积(mm) | 68 × 68 × 45 | |
| 重量 | 198 g | 192 g |
| 电压 | 12 - 24V(DC) @ 3A | |
| 工作温度 ℃ | -20° to +60° | |
| 产品名称 | M系列-车规级 | |||
| XT-M120 Mini | XT-M120 Pro | XM-M120 Max | XT-M60 | |
| 场景 | 中速 | 中高速 | 车载补盲(中低速) | |
| FOV 图像视角 | 106° × 80° | 72° × 58° | 32° × 24° | 120° × 45° |
| 光波长 | 940 nm | |||
| 平均功率 | 12 W | 6 W | ||
| 输出数据 | 3D点云、深度图像、反射率图、灰度图 | |||
| SDK | C++ / Python / Linux / Ros1 & Ros2 | |||
| 准度 | 1% - 2% | |||
| 角分辨率 | 0.33°(H) × 0.66°(V) | 0.22°(H) × 0.48°(V) | 0.1°(H) × 0.2°(V) | 0.75°(H) × 0.75°(V) |
| 分辨率 | 320 × 120 |
160 × 60 | ||
| 测试距离 50% 反射率 |
20 m 室外 | 30 m 室外 |
80 m 室外 |
15 m 室外 |
| 帧率(FPS) | 10 - 50 |
1 - 30 | ||
| 体积(mm) | 72 × 72 × 48 |
65 × 35 × 45 |
||
| 重量 | 220 g |
123 g | ||
| 电压 | 12 - 24V(DC) @ 3A 航空接口 |
12 - 24V(DC) @ 3A | ||
| 工作温度 ℃ | -40° to +85° |
|||
说明:
科艺仪器提供基于TOF, FMCW 及FLASH技术的2D,3D激光雷达,以满足不同应用的移动机器人及AI的开发需求。同时,我们也提供连续稳定输出位姿信息的位算单元,助力泛移动机器人系统敏捷开发。
中德睿博 - 助力泛移动机器人系统敏捷开发
基于底层的多传感器时间同步架构及多源数据技术,中德睿博为不同需求的客户提供全场景定位的模块化标准产品,包含:
欧镭激光- 2D、3D ToF 激光雷达
欧镭激光提供面向工业和商业移动机器人的导航定位和避障用1D,2D,3D激光雷达。
摩尔芯光 - FMCW 激光雷达
拥有自有知识产权的光子集成技术,致力于研发和生产基于硅光技术的激光雷达(LiDAR)芯片及系统,并专注于下一代 FMCW 技术路线的激光雷达的整机开发及量产。
芯探 - Flash 激光雷达
芯探的Flash激光雷达具备测距能力长、抗干扰能力强、适合大规模量产等优势,可以将更高效的感知能力赋予车辆、机器人、物联网、安防等行业。
苏州中德睿博智能科技有限公司(Sino-German Robooster Intelligent Technology Co. Ltd)
由机器人与导航定位专业的留德博士于2015年创立,秉承“严谨、耐心、专业、精益求精”的工匠精神,以“让人工智能‘慧’眼识途”为愿景,立志做全球的全场景定位解决方案供应商。团队深耕移动机器人及自主移动解决方案多年,专注于多传感器信息融合、全源融合定位、即时成图与定位(SLAM)、移动载体运动测量等领域,集行业认知、核心技术、批量生产、供应链优势于一身。
公司的主要产品包含:
时间同步器(RS-TS5)
RS-TS5可基于外部1PPS 或者内部时钟,实现8通道的同步触发信号生成。8个通道之间、8个通道与外部 1PPS之间的同步精度达到µs级,当外部 1PPS 无效时,可自动切换为外部基准。8个通道参数可通过串口单独配置,配置参数包括输出频率、输出占空比和输出有效电平。
特点:
组合导航及外同步模块与组合导航基站(RS-INTS1、RS-INTB1)
RS-INTS1组合导航及外同步模块内部集成双天线差分GNSS模块、3轴陀螺、3轴加速度计、3轴磁强计以及气压计,内部传感器采样时严格与1PPS 同步,同时将GNSS 的1PPS 作为输入,可以根据用户配置的频率,生成并输出与1PPS同步的最多6路同步信号,用来给用户的其他设备提供触发信号,6 路同步信号的频率、占空比等均单独可配置。组合导航及外同步模块内部集成4G模块,与RS-INTB1组合导航基站模块配对使用,上电自动与组合导航基站模块通信,实现上电即可高精度 RTK 定位。双天线差分 GNSS 模块同时可为用户提供高精度的方位输出。RS-INTS1亦支持千寻数据的RTK,无需复杂操作,客户端输入千寻账号后,即可一键RTK。
特点:
多源融合同步采集设备(RS-SLAMBase/RS-SLAMBasePro)
SLAM Base多源融合同步采集设备采用高性能ARM多核处理器,内部集成双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压计,内部传感器采样与1PPS同步,同时将GNSS的1PPS作为输入,可以根据用户配置的频率,生成并输出与1PPS同步的最多4路同步信号,用来给用户的其他传感器提供触发信号,是SLAM及三维维重构研究的理想同步采集平台。
特点:
多源融合定位与建图装置(RS-SLAMPlus/RS-SLAMPlusPro)
SLAM Plus全源融合定位建图设备是一款高度集成的高性能感知设备,融合了先进的传感器技术和时间同步机制。该设备内部集成四目环视相机、激光雷达、双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压计,内部传感器采样严格与1PPS(Pulse Per Second)同步,所有传感器数据采用ROS节点方式输出,所有数据接口均采用带锁扣连接器,更适合移动载体。SLAM Plus为多传感器融合、SLAM、测绘三维建模及全源融合导航研究者提供了一个强大即插即用的解决方案,是当今头部的感知测量和全源融合导航开发平台。
特点:
简介:
产品:
欧镭激光提供面向工业和商业移动机器人的导航定位和避障用1D,2D,3D激光雷达。
A090/A200 1D激光测距传感器
特点:
应用:
LR-1BS2 2D激光雷达传感器
特点:
应用:
|
LR-1BS5 2D激光雷达传感器
特点:
应用:
|
VF1-25系列 2D激光雷达传感器
特点:
应用:
|
LR-1F 2D激光雷达传感器
特点:
应用:
|
GS1-5功能安全型激光雷达传感器
特点:
应用:
|
LR-16F 3D激光雷达传感器
特点:
应用:
|
摩尔芯光(LightIC)于2019 年成立,总部位于北京。
公司拥有光子集成技术,致力于研发和生产基于硅光技术的激光雷达(LiDAR)芯片及系统,并专注于下一代 FMCW 技术路线的激光雷达的整机开发及量产。
FMCW雷达因具备强抗干扰性、低功耗及高精度测距测速优势,广泛应用于汽车、无人机导航、工业自动化和航空航天等领域。
摩尔芯光已成功推出FMCW动态瞬识激光雷达系统LARK
LARK核心优势:
主要技术参数:
| 参数 | 指标 |
| 激光级别: | Class 1 |
| 测距范围: | 1~300m (200m @10%) |
| 测距准度 1σ: | 3cm |
| 测速范围: | -240~240km/h |
| 测速精度: | 0.05 m/s |
| 盲区: | ~0.5m |
| 水平视场: | 120° |
| 水平分辨率: | 0.1° |
| 垂直视场: | 25° |
| 最小垂直分辨率: | 0.08° |
| 角度精度: | 0.05° |
| 帧率(fps): | ~10Hz |
| 回波模式: | 支持单回波 & 双回波 |
| 点频: | 1.5M/s(单回波),3M/s(双回波) |
| 传输方式: | 1000Mbps Ethernet over UDP connection |
| 时间同步: | PTP |
| 尺寸 W*D*H(mm): |
206mm x 140mm x 46mm |
| 重量: | 1.9 Kg |
| 数据内容: | 时间戳,点位置信息,速度,反射率 |
| 电压范围: | DC 9-32V |
| 功耗: | ~90W |
| 防护等级: | IP67 |
| 工作温度: | -20~65℃ |
芯探的Flash激光雷达具备测距能力长、抗干扰能力强、适合大规模量产等优势,可以将更高效的感知能力赋予车辆、机器人、物联网、安防等行业,让人类生活更舒适高效。
产品特点:
应用范围:
|
|
|
| 体积测量 | 门禁/安防 | 机器人 |
|
|
|
| 辅助驾驶 | 智慧道路 | 无人车 |
| 产品名称 | S系列-工业级 | |
| XT-S240 Mini | XT-S240 Pro | |
| 场景 | 低速 | |
| FOV 图像视角 | 106° × 80° | 72° × 58° |
| 光波长 | 940 nm | |
| 平均功率 | 6 W | |
| 输出数据 | 3D点云、深度图像、反射率图、灰度图 | |
| SDK | C++ / Python / Linux / Ros1 & Ros2 | |
| 准度 | 1% - 2% | |
| 角分辨率 | 0.33°(H) × 0.33°(V) | 0.22°(H) × 0.24°(V) |
| 分辨率 | 320 × 240 | |
| 测试距离 50% 反射率 |
10 m 室外 | 15 m 室外 |
| 帧率(FPS) | 10 - 20 | |
| 体积(mm) | 68 × 68 × 45 | |
| 重量 | 198 g | 192 g |
| 电压 | 12 - 24V(DC) @ 3A | |
| 工作温度 ℃ | -20° to +60° | |
| 产品名称 | M系列-车规级 | |||
| XT-M120 Mini | XT-M120 Pro | XM-M120 Max | XT-M60 | |
| 场景 | 中速 | 中高速 | 车载补盲(中低速) | |
| FOV 图像视角 | 106° × 80° | 72° × 58° | 32° × 24° | 120° × 45° |
| 光波长 | 940 nm | |||
| 平均功率 | 12 W | 6 W | ||
| 输出数据 | 3D点云、深度图像、反射率图、灰度图 | |||
| SDK | C++ / Python / Linux / Ros1 & Ros2 | |||
| 准度 | 1% - 2% | |||
| 角分辨率 | 0.33°(H) × 0.66°(V) | 0.22°(H) × 0.48°(V) | 0.1°(H) × 0.2°(V) | 0.75°(H) × 0.75°(V) |
| 分辨率 | 320 × 120 |
160 × 60 | ||
| 测试距离 50% 反射率 |
20 m 室外 | 30 m 室外 |
80 m 室外 |
15 m 室外 |
| 帧率(FPS) | 10 - 50 |
1 - 30 | ||
| 体积(mm) | 72 × 72 × 48 |
65 × 35 × 45 |
||
| 重量 | 220 g |
123 g | ||
| 电压 | 12 - 24V(DC) @ 3A 航空接口 |
12 - 24V(DC) @ 3A | ||
| 工作温度 ℃ | -40° to +85° |
|||
说明:



 沪公网安备31011002002121号
沪公网安备31011002002121号

电话:+ 852 2755 6578
地址:九龙湾启祥道9号信和工商中心1楼68室
电话:400 886 0017
地址:上海市杨浦区松花江路251弄白玉兰环保广场3号8层
© 2011-现在 初尝人妻滑进去了莹莹视频-国产二级一片内射视频播放-无码人妻丰满熟妇A片护士M-亚洲午夜久久久精品影院-亚洲精品又粗又大又爽A片 版权所有
